
Remiantis naujos strategijos nepilotuojamo vairavimo pramonės instituto statistika, 2021 m. buvo atskleista daugiau nei 200 svarbių finansinių įvykių autonominio vairavimo pramonėje šalyje ir užsienyje, kurių bendra finansavimo suma siekė beveik 150 milijardų juanių (įskaitant IPO).Viduje beveik 70 finansinių renginių ir daugiau nei 30 milijardų juanių surinko mažo greičio nepilotuojamų produktų ir sprendimų tiekėjai.
Per pastaruosius dvejus metus atsirado nepilotuojamo pristatymo, nepilotuojamo valymo ir nepilotuojamo sandėliavimo nusileidimo scenarijai, o stiprus kapitalo įėjimas pastūmėjo nepilotuojamas transporto priemones į plėtros greitąją juostą.Sukūrus kelių režimų jutiklių suliejimo technologiją, į „profesionalių“ komandą pateko novatoriški atstovai, atliekantys įvairias užduotis, tokias kaip kelių valymas, siuntimas ir greitasis siuntimas, siuntų pristatymas ir kt.

Dirba nepilotuojamos valymo mašinos
Kaip „ateities profesinė transporto priemonė“, pakeičianti darbo jėgą, taikomi kliūčių išvengimo sprendimai neturi būti aplaidūs, kad laimėtų besiformuojančioje pramonėje, o transporto priemonė turi būti įgalinta pagal darbo scenarijų, pavyzdžiui, nepilotuojama transporto priemonė sanitarijos pramonėje. turėtų atlikti atsargų identifikavimo funkciją;su saugaus kliūčių išvengimo funkcija pristatymo pramonėje;su avarinės rizikos vengimo funkcija saugojimo pramonėje……
- Sanitarijos pramonė: protingų jutimų trejybėchemija

Sanitarijos pramonė – pateikta intelektualių jutimo schemų trejybė
Pekino žiemos olimpinių žaidynių „švaresnis“ robotas „Candela Sunshine“ naudoja intelektualiųjų jutimo schemų trejybę, aprūpintą 19 ultragarsinių radarų, leidžiančių robotui atlikti visas kliūčių išvengimo, perpildymo prevencijos ir antidempingo funkcijas.
Aapvaluskliūčių vengimas
Gale sumontuoti 2 ultragarsiniai radarai atbulinės eigos stebėjimui ir kliūčių perspėjimui, 3 ultragarsiniai radarai po priekiu ir 6 ultragarsiniai radarai šonuose, skirti horizontaliam, vertikaliam ir įstrižai važiavimo aplinkui bei kliūčių išvengimo funkcijoms.
Perpildymo prevencija
Transporto priemonės pakrovimo zonos viršuje sumontuokite jutiklį, kad būtų galima stebėti pakrovimo situaciją ir užtikrinti, kad pakrovimo talpa atitiktų saugos standartus.
Antidempingas
Apsaugo nuo padalijimo sekcijai apvirsti dėl išorinių jėgų neapkrautoje arba per mažai apkrautoje būsenoje, o tai kelia pavojų visuomenės saugumui.
- Pristatymo pramonė:visapusiškasprotingas kliūčių vengimas schemija
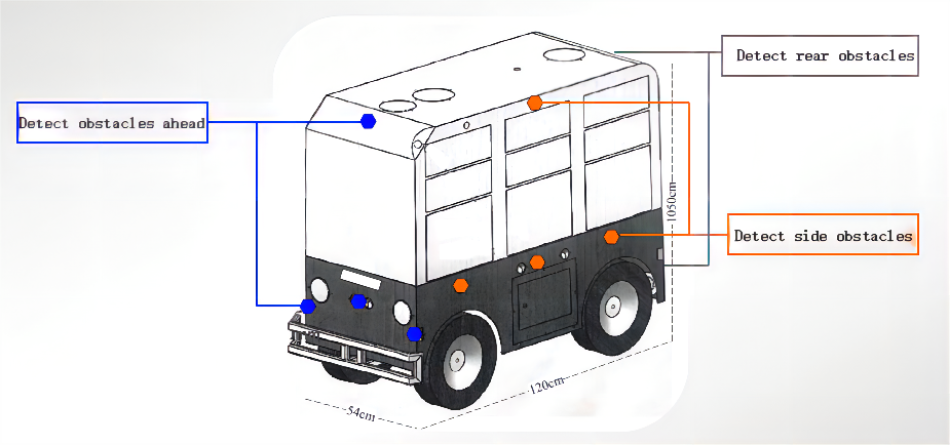
Pristatymo pramonė – dalinis išsamios išmaniosios kliūčių vengimo schemos demonstravimas
Palyginti su tolimųjų reisų logistika, pristatymo pramonės scenarijaus esmė yra trumpais atstumais ir dideliu dažnumu, o tai reiškia, kad nepilotuojamos pristatymo transporto priemonės turi būti suprojektuotos taip, kad būtų lankstesnės ir saugesnės, kad galėtų susidoroti su sudėtingais miesto scenarijais, pavyzdžiui, pervežimais į pastatus. ir alėjos kliūčių vengimas.DYP pateikė „Zhixing Technology“ išsamią išmaniąją kliūčių vengimo schemą, todėl jos gaminys tapo nepilotuojama pristatymo transporto priemone, kuri bus išbandyta pusiau atviroje aplinkoje Kinijoje.
Priekinių ir galinių kliūčių išvengimas
Priekyje ir gale yra vienas ultragarsinis radaras, skirtas aptikti aukštesnes kliūtis, pavyzdžiui, aukščio ribojančius stulpus;priekyje ir gale yra trys ultragarsiniai radarai, skirti aptikti žemas ir priekines šonines kliūtis, tokias kaip ribojantys stulpai.Tuo pačiu metu priekyje ir gale esantys ultragarsiniai radarai gali apsaugoti nepilotuojamą transporto priemonę, kad ji galėtų važiuoti atbuline eiga arba apsisukti.
Šoninių kliūčių išvengimas
Virš kiekvienos pusės sumontuotas vienas ultragarsinis radaras, kuris aptinka aukštas šonines kliūtis ir padeda suaktyvinti greitojo pristatymo funkciją;po kiekviena puse sumontuoti trys ultragarsiniai radarai, kad aptiktų žemas kliūtis, tokias kaip kelio kraštai, žalios juostos ir stovintys stulpai.Be to, kairėje ir dešinėje pusėse esantys ultragarsiniai radarai sugeba rasti reikiamą „parkavimo vietą“ nepilotuojamai transporto priemonei ir sėkmingai užbaigia automatinį parkavimą.
- Sandėliavimo pramonė: avarinių situacijų išvengimas ir maršruto optimizavimaszacijos schemija

AGV kliūčių išvengimo diagrama
Įprastos sandėlio nepilotuojamos transporto priemonės yra išdėstytos vietiniam kelių planavimui naudojant infraraudonųjų spindulių ir lazerinių technologijų sprendimus, tačiau abu jų tikslumą veikia šviesa, o sandėlyje susikertant keliems vežimėliams gali kilti susidūrimo pavojus.Dianyingpu teikia avarinės rizikos išvengimo ir maršruto optimizavimo sprendimus sandėliavimo pramonei, kuriai neveikia šviesa, naudojant ultragarsinį radarą, padedantį sandėlio AGV pasiekti autonominį kliūčių išvengimą sandėliuose, savalaikį ir tikslų parkavimą krizės metu, kad būtų išvengta susidūrimų.
Skubus atvėjisvengimas
Ultragarsiniam radarui aptikus kliūtį, patenkančią į perspėjimo zoną, jutiklis AGV valdymo sistemai laiku pateiks artimiausios kliūties orientacijos informaciją iki nepilotuojamo vežimėlio, o valdymo sistema valdys vežimėlį, kad jis sulėtintų greitį ir stabdytų.Dėl tų kliūčių, kurios nėra vežimėlio priekinėje zonoje, net jei jos yra arti, radaras neįspės, kad užtikrintų vežimėlio darbo efektyvumą.
Optimalus maršrutaszsijos
Nepilotuojama transporto priemonė naudoja lazerinį taškinį debesį kartu su didelio tikslumo žemėlapiu, kad galėtų planuoti vietinį maršrutą ir gauti kelias pasirinktinas trajektorijas.Tada ultragarsu gauta kliūčių informacija projektuojama ir atgal apskaičiuojama į transporto priemonės koordinačių sistemą, gautos pasirinktinos trajektorijos toliau filtruojamos ir koreguojamos, galiausiai išvedama optimali trajektorija ir pagal šią trajektoriją atliekamas judėjimas pirmyn.

- Galimybė veikti iki 5 m,akloji vieta net 3 cm
- Stabilus, neveikiamas šviesos irišmatuotos spalvos objektas
- Didelis patikimumas, susitiktu sutransporto priemonių klasės reikalavimai
Paskelbimo laikas: 2022-08-30